add demos to README.md
This commit is contained in:
@@ -4,21 +4,59 @@ Generate random samples on the surface of a mesh
|
||||
<!-- __demos__ -->
|
||||
## Demos
|
||||
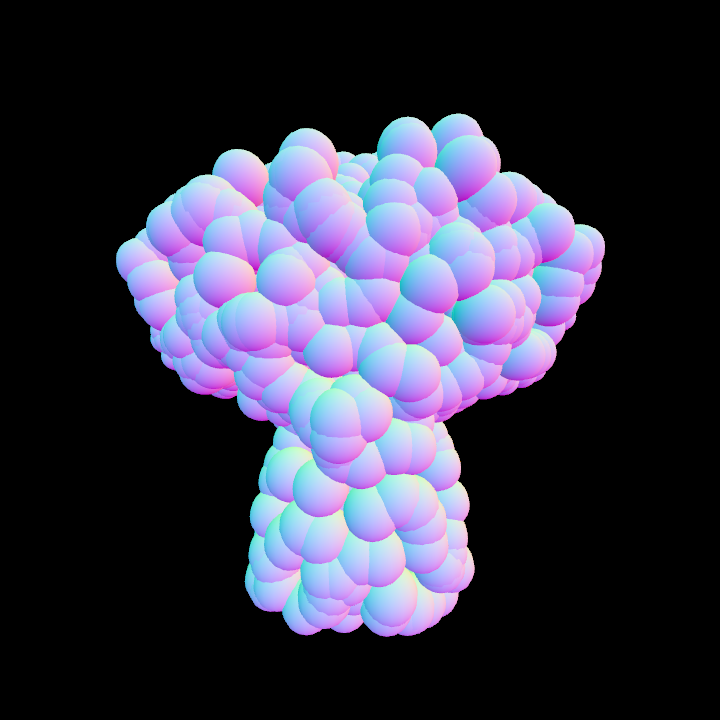
### DemoMeshNoise01
|
||||
[source code](src/jvmDemo/kotlin/DemoMeshNoise01.kt)
|
||||
|
||||
This demo creates a 3D visualization program using the OPENRNDR framework.
|
||||
It demonstrates loading an OBJ model, generating uniform points on the surface
|
||||
of the mesh, and rendering these points as small spheres using a custom shader.
|
||||
|
||||
The following key processes are performed:
|
||||
- Loading mesh data from an OBJ file.
|
||||
- Generating a list of uniformly distributed points on the mesh surface.
|
||||
- Rendering the generated points with small spheres.
|
||||
- Using an "Orbital" extension for interactive camera control.
|
||||
- Applying a shader effect to visualize surface normals.
|
||||
|
||||
The application runs with a window size of 720x720 pixels and positions the camera
|
||||
in front of the scene using the "Orbital" extension.
|
||||
|
||||
|
||||
### DemoMeshNoise02
|
||||
[source code](src/jvmDemo/kotlin/DemoMeshNoise02.kt)
|
||||
[source code](src/jvmDemo/kotlin/DemoMeshNoise01.kt)
|
||||
|
||||
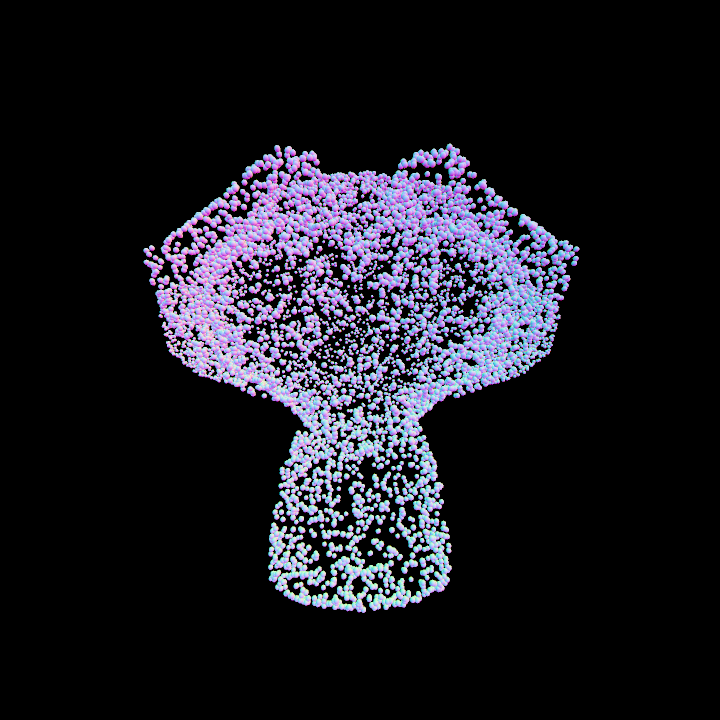
### DemoMeshNoise02
|
||||
|
||||
Demonstrate uniform point on mesh generation using hash functions
|
||||
|
||||
|
||||
### DemoMeshNoise03
|
||||
[source code](src/jvmDemo/kotlin/DemoMeshNoise03.kt)
|
||||
[source code](src/jvmDemo/kotlin/DemoMeshNoise02.kt)
|
||||
|
||||
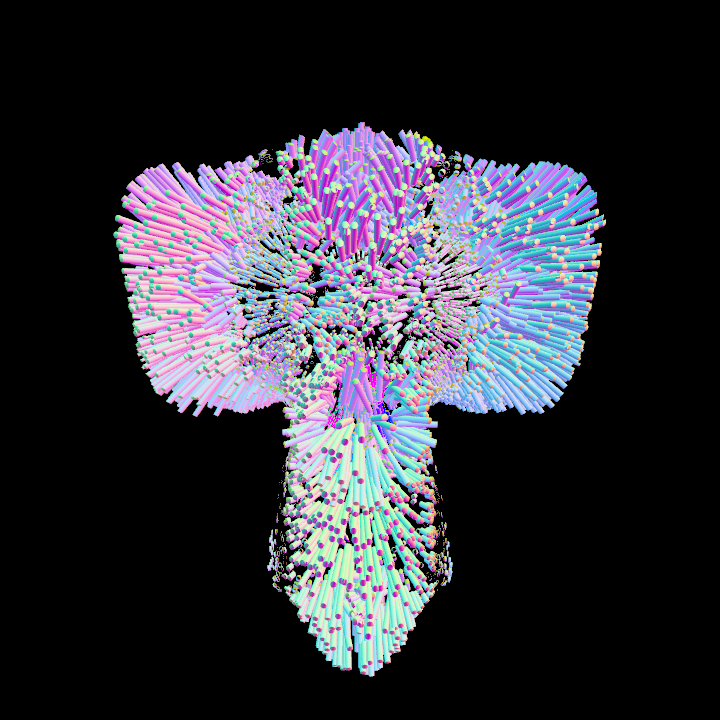
### DemoMeshNoise03
|
||||
|
||||
This demo loads a 3D model from an OBJ file, processes the mesh data to estimate normals and tangents, and generates
|
||||
a set of uniformly distributed pose points. These pose points determine the transformations applied to individual
|
||||
objects rendered in the viewport.
|
||||
|
||||
It extends the rendering with an orbital camera for navigation and shaders for custom visual
|
||||
effects. Cylinders represent transformed objects, with their scale animations based on time-dependent
|
||||
trigonometric functions.
|
||||
|
||||
|
||||
### DemoNonUniformMeshNoise01
|
||||
[source code](src/jvmDemo/kotlin/DemoNonUniformMeshNoise01.kt)
|
||||
[source code](src/jvmDemo/kotlin/DemoMeshNoise03.kt)
|
||||
|
||||
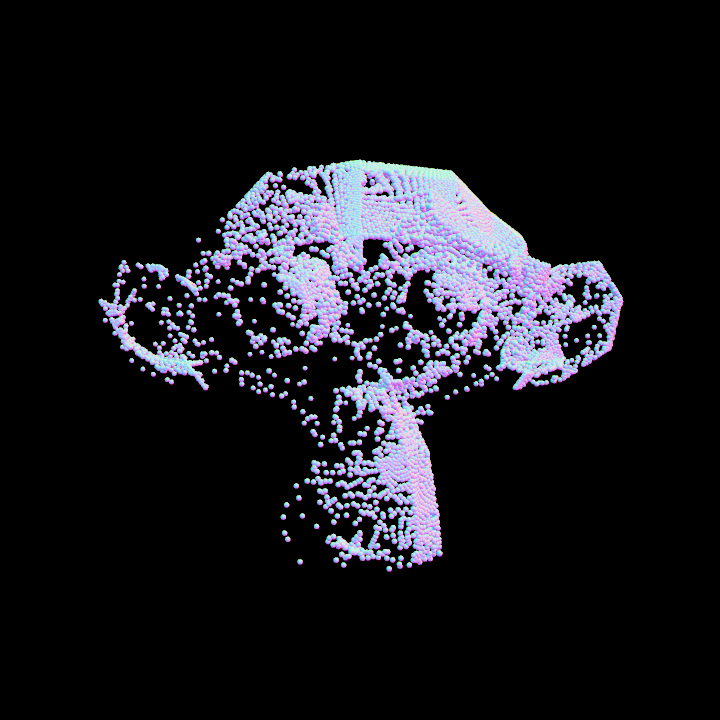
### DemoNonUniformMeshNoise01
|
||||
|
||||
The program demonstrates the loading of a 3D model, estimating its normals,
|
||||
sampling points based on non-uniform distribution, and rendering points as spheres.
|
||||
|
||||
Key functionalities include:
|
||||
- Loading a 3D model from an OBJ file.
|
||||
- Estimating per-vertex normals for the mesh.
|
||||
- Generating and rendering a sphere mesh for sampled points.
|
||||
- Using a lighting direction vector to bias the point sampling distribution.
|
||||
- Extending the program with an orbital camera for interactive navigation.
|
||||
- Applying shading to simulate lighting effects based on vertex normals.
|
||||
|
||||
The rendering of spheres is performed by iterating over the sampled points and isolating each in the transformation matrix.
|
||||
This setup allows customization for complex rendering pipelines.
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/DemoNonUniformMeshNoise01.kt)
|
||||
|
||||
Reference in New Issue
Block a user