add demos to README.md
This commit is contained in:
@@ -188,131 +188,265 @@ val v8 = billow(seed, x, y, z, ::perlinLinear, octaves, lacunarity, gain)
|
||||
<!-- __demos__ -->
|
||||
## Demos
|
||||
### DemoCubicNoise2D01
|
||||
[source code](src/jvmDemo/kotlin/DemoCubicNoise2D01.kt)
|
||||
|
||||
|
||||

|
||||
|
||||
[source code](src/jvmDemo/kotlin/DemoCubicNoise2D01.kt)
|
||||
|
||||
### DemoFunctionalComposition01
|
||||
[source code](src/jvmDemo/kotlin/DemoFunctionalComposition01.kt)
|
||||
|
||||
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/DemoFunctionalComposition01.kt)
|
||||
|
||||
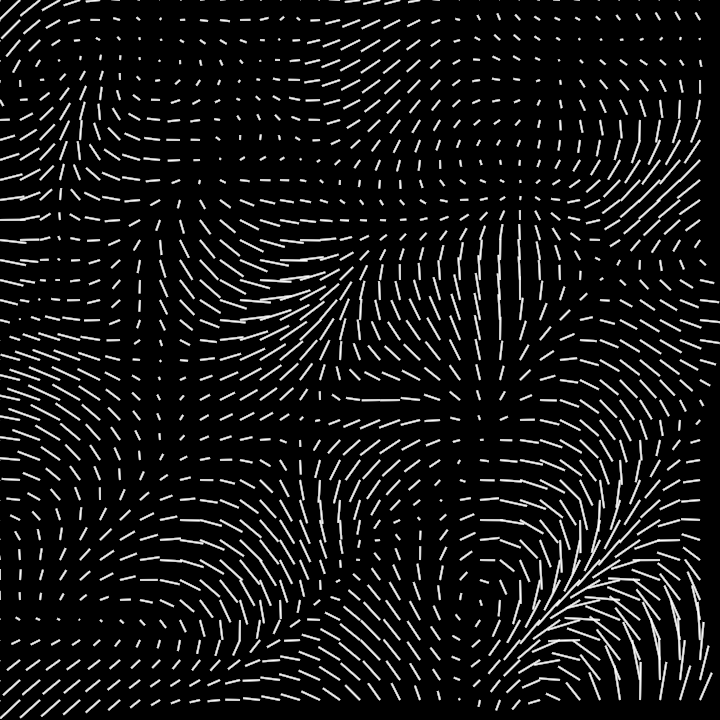
### DemoGradientPerturb2D
|
||||
[source code](src/jvmDemo/kotlin/DemoGradientPerturb2D.kt)
|
||||
|
||||
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/DemoGradientPerturb2D.kt)
|
||||
|
||||
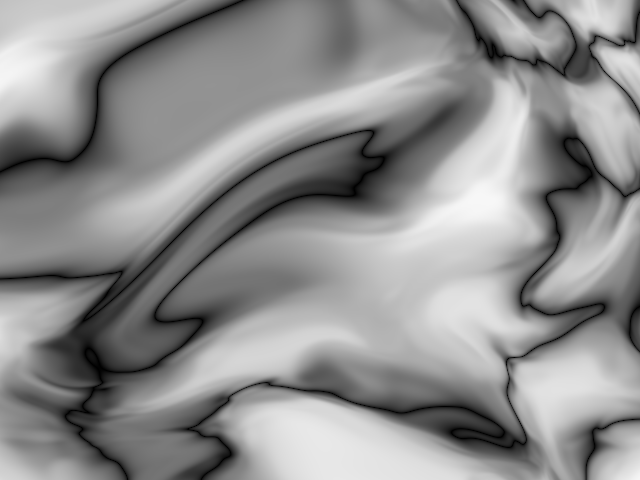
### DemoGradientPerturb3D
|
||||
[source code](src/jvmDemo/kotlin/DemoGradientPerturb3D.kt)
|
||||
|
||||
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/DemoGradientPerturb3D.kt)
|
||||
|
||||
### DemoScatter01
|
||||
[source code](src/jvmDemo/kotlin/DemoScatter01.kt)
|
||||
|
||||
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/DemoScatter01.kt)
|
||||
|
||||
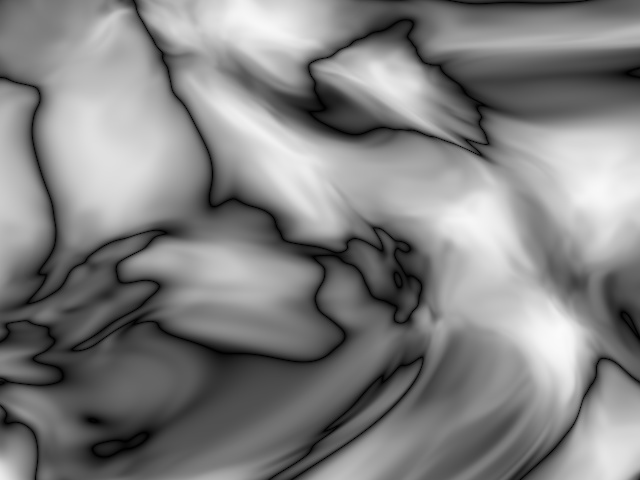
### DemoSimplex01
|
||||
[source code](src/jvmDemo/kotlin/DemoSimplex01.kt)
|
||||
|
||||
|
||||
|
||||
|
||||
### DemoTriangleNoise01
|
||||
[source code](src/jvmDemo/kotlin/DemoTriangleNoise01.kt)
|
||||
[source code](src/jvmDemo/kotlin/DemoSimplex01.kt)
|
||||
|
||||
### DemoTriangleNoise01
|
||||
|
||||
Demonstrate the generation of uniformly distributed points inside a list of triangles
|
||||
@see <img src="https://raw.githubusercontent.com/openrndr/orx/media/orx-noise/images/DemoTriangleNoise01Kt.png">
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/DemoTriangleNoise01.kt)
|
||||
|
||||
### DemoValueNoise2D01
|
||||
[source code](src/jvmDemo/kotlin/DemoValueNoise2D01.kt)
|
||||
|
||||
|
||||

|
||||
|
||||
### glsl/DemoNoisesGLSLGui
|
||||
[source code](src/jvmDemo/kotlin/glsl/DemoNoisesGLSLGui.kt)
|
||||
[source code](src/jvmDemo/kotlin/DemoValueNoise2D01.kt)
|
||||
|
||||
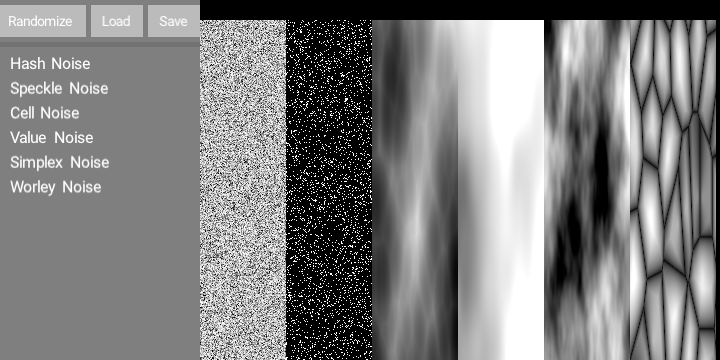
### glsl/DemoNoisesGLSLGui
|
||||
|
||||
Render existing GLSL noise algorithms side by side.
|
||||
Use the GUI to explore the effects.
|
||||
|
||||
|
||||
### glsl/DemoNoisesGLSL
|
||||
[source code](src/jvmDemo/kotlin/glsl/DemoNoisesGLSL.kt)
|
||||
[source code](src/jvmDemo/kotlin/glsl/DemoNoisesGLSLGui.kt)
|
||||
|
||||
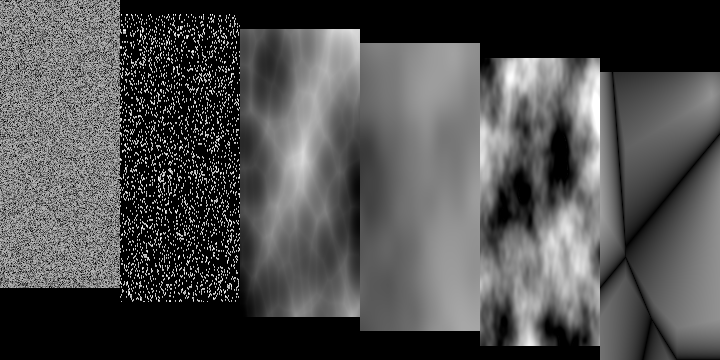
### glsl/DemoNoisesGLSL
|
||||
|
||||
Render existing GLSL noise algorithms side by side.
|
||||
Re-use the same color buffer for the rendering.
|
||||
Not all noise properties are used. Explore each noise class
|
||||
to find out more adjustable properties.
|
||||
The noise color can be set using a `color` or a `gain` property.
|
||||
|
||||
|
||||
### glsl/DemoSimplexGLSL
|
||||
[source code](src/jvmDemo/kotlin/glsl/DemoSimplexGLSL.kt)
|
||||
[source code](src/jvmDemo/kotlin/glsl/DemoNoisesGLSL.kt)
|
||||
|
||||
### glsl/DemoSimplexGLSL
|
||||
|
||||
A sine oscillator with randomized parameters
|
||||
|
||||
|
||||
### hammersley/DemoHammersley2D01
|
||||
[source code](src/jvmDemo/kotlin/hammersley/DemoHammersley2D01.kt)
|
||||
[source code](src/jvmDemo/kotlin/glsl/DemoSimplexGLSL.kt)
|
||||
|
||||
### hammersley/DemoHammersley2D01
|
||||
|
||||
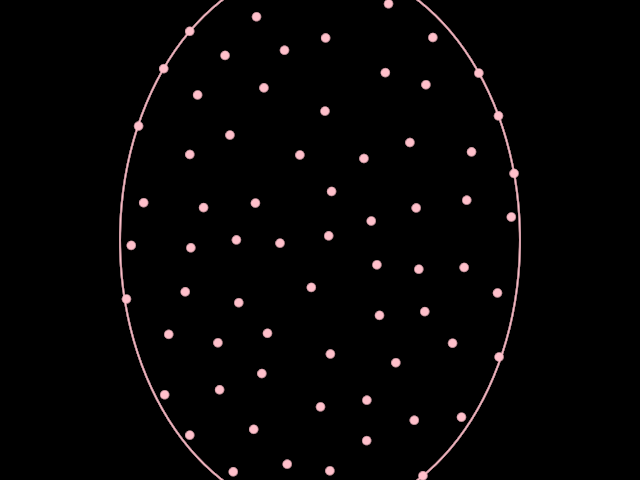
Demo that visualizes a 2D Hammersley point set.
|
||||
|
||||
The application is configured to run at 720x720 resolution. The program computes
|
||||
400 2D Hammersley points mapped within the bounds of the application's resolution.
|
||||
These points are visualized by rendering circles at their respective positions.
|
||||
|
||||
|
||||
### hammersley/DemoHammersley3D01
|
||||
[source code](src/jvmDemo/kotlin/hammersley/DemoHammersley3D01.kt)
|
||||
[source code](src/jvmDemo/kotlin/hammersley/DemoHammersley2D01.kt)
|
||||
|
||||
### hammersley/DemoHammersley3D01
|
||||
|
||||
Demo program rendering a 3D visualization of points distributed using the Hammersley sequence in 3D space.
|
||||
|
||||
The application is set up at a resolution of 720x720 pixels. Within the visual
|
||||
program, a sphere mesh is created and a set of 1400 points is generated using
|
||||
the Hammersley sequence. Each point is translated and rendered as a small sphere
|
||||
in 3D space. This is achieved by mapping the generated points into a scaled domain.
|
||||
|
||||
The rendering utilizes the Orbital extension, enabling an interactive 3D camera
|
||||
to navigate the scene. The visualization relies on the draw loop for continuous
|
||||
rendering of the points.
|
||||
|
||||
|
||||
### hammersley/DemoHammersley4D01
|
||||
[source code](src/jvmDemo/kotlin/hammersley/DemoHammersley4D01.kt)
|
||||
[source code](src/jvmDemo/kotlin/hammersley/DemoHammersley3D01.kt)
|
||||
|
||||
### hammersley/DemoHammersley4D01
|
||||
|
||||
Demo that visualizes a 4D Hammersley point set in a 3D space, with colors determined by the 4th dimension.
|
||||
|
||||
The application is configured at a resolution of 720x720 pixels. A sphere mesh is created
|
||||
using the `sphereMesh` utility, and a total of 10,000 4D points are generated with the
|
||||
`hammersley4D` sequence. These points are scaled, translated, and rendered as small spheres.
|
||||
The color of each sphere is modified based on the 4th dimension of its corresponding point by
|
||||
shifting the hue in HSV color space.
|
||||
|
||||
This program employs the `Orbital` extension, enabling camera interaction for 3D navigation
|
||||
of the scene. Rendering occurs within the draw loop, providing continuous visualization
|
||||
of the point distribution.
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/hammersley/DemoHammersley4D01.kt)
|
||||
|
||||
### hash/DemoCircleHash01
|
||||
[source code](src/jvmDemo/kotlin/hash/DemoCircleHash01.kt)
|
||||
|
||||
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/hash/DemoCircleHash01.kt)
|
||||
|
||||
### hash/DemoRectangleHash01
|
||||
[source code](src/jvmDemo/kotlin/hash/DemoRectangleHash01.kt)
|
||||
|
||||
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/hash/DemoRectangleHash01.kt)
|
||||
|
||||
### hash/DemoUHash01
|
||||
[source code](src/jvmDemo/kotlin/hash/DemoUHash01.kt)
|
||||
|
||||
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/hash/DemoUHash01.kt)
|
||||
|
||||
### linearrange/DemoLinearRange01
|
||||
[source code](src/jvmDemo/kotlin/linearrange/DemoLinearRange01.kt)
|
||||
|
||||
|
||||
|
||||
|
||||
### phrases/DemoUHashPhrase01
|
||||
[source code](src/jvmDemo/kotlin/phrases/DemoUHashPhrase01.kt)
|
||||
[source code](src/jvmDemo/kotlin/linearrange/DemoLinearRange01.kt)
|
||||
|
||||
### phrases/DemoUHashPhrase01
|
||||
|
||||
Demonstrate uniform hashing function phrase in a shadestyle
|
||||
|
||||
|
||||
### rseq/DemoRseq2D01
|
||||
[source code](src/jvmDemo/kotlin/rseq/DemoRseq2D01.kt)
|
||||
[source code](src/jvmDemo/kotlin/phrases/DemoUHashPhrase01.kt)
|
||||
|
||||
### rseq/DemoRseq2D01
|
||||
|
||||
This demo sets up a window with dimensions 720x720 and renders frames
|
||||
demonstrating 2D quasirandomly distributed points. The points are generated
|
||||
using the R2 sequence and drawn as circles with a radius of 5.0.
|
||||
|
||||
|
||||
### rseq/DemoRseq3D01
|
||||
[source code](src/jvmDemo/kotlin/rseq/DemoRseq3D01.kt)
|
||||
[source code](src/jvmDemo/kotlin/rseq/DemoRseq2D01.kt)
|
||||
|
||||
### rseq/DemoRseq3D01
|
||||
|
||||
This demo renders a 3D visualizationof points distributed using the R3 quasirandom sequence. Each point is
|
||||
represented as a sphere and positioned in 3D space based on the quasirandom sequence values.
|
||||
|
||||
The visualization setup includes:
|
||||
- Configuration of application window size to 720x720.
|
||||
- Usage of an orbital camera for interactive 3D navigation.
|
||||
- Creation of a reusable sphere mesh with a specified radius.
|
||||
- Generation of quasirandom points in 3D space using the `rSeq3D` function.
|
||||
- Transformation and rendering of each point as a sphere using vertex buffers.
|
||||
|
||||
|
||||
### rseq/DemoRseq4D01
|
||||
[source code](src/jvmDemo/kotlin/rseq/DemoRseq4D01.kt)
|
||||
[source code](src/jvmDemo/kotlin/rseq/DemoRseq3D01.kt)
|
||||
|
||||
### rseq/DemoRseq4D01
|
||||
|
||||
Demo that presents a 3D visualization of points distributed using a 4D quasirandom sequence (R4).
|
||||
Each point is represented as a sphere with it position and color derived from the sequence values.
|
||||
|
||||
This function performs the following tasks:
|
||||
- Configures the application window dimensions to 720x720 pixels.
|
||||
- Initializes a 3D camera for orbital navigation of the scene.
|
||||
- Generates 10,000 points in 4D space using the `rSeq4D` function. The points are scaled
|
||||
and transformed into 3D positions with an additional w-coordinate for color variation.
|
||||
- Creates a reusable sphere mesh for rendering.
|
||||
- Renders each point as a sphere with its position determined by the 3D coordinates
|
||||
of the point and its color calculated by shifting the hue of a base color using
|
||||
the w-coordinate value.
|
||||
|
||||
|
||||
### simplexrange/DemoSimplexRange2D01
|
||||
[source code](src/jvmDemo/kotlin/simplexrange/DemoSimplexRange2D01.kt)
|
||||
[source code](src/jvmDemo/kotlin/rseq/DemoRseq4D01.kt)
|
||||
|
||||
### simplexrange/DemoSimplexRange2D01
|
||||
|
||||
This demo creates a dynamic graphical output utilizing simplex and
|
||||
linear interpolation-based color ranges.
|
||||
|
||||
Functionalities:
|
||||
- Defines a list of base colors converted to LAB color space for smooth interpolation.
|
||||
- Constructs a 3D simplex range and a 2D linear range for color sampling.
|
||||
- Randomly populates two sections of the screen with rectangles filled with colors
|
||||
sampled from simplex and linear ranges respectively.
|
||||
- Draws a vertical divider line in the middle of the application window.
|
||||
|
||||
|
||||
### simplexrange/DemoSimplexRange2D02
|
||||
[source code](src/jvmDemo/kotlin/simplexrange/DemoSimplexRange2D02.kt)
|
||||
[source code](src/jvmDemo/kotlin/simplexrange/DemoSimplexRange2D01.kt)
|
||||
|
||||
### simplexrange/DemoSimplexRange2D02
|
||||
|
||||
This demo creates a dynamic graphical output utilizing simplex and
|
||||
linear interpolation-based color ranges.
|
||||
|
||||
Functionalities:
|
||||
- Defines a list of base colors converted to LAB color space for smooth interpolation.
|
||||
- Constructs a 3D simplex range and a 2D linear range for color sampling.
|
||||
- Randomly populates two sections of the screen with rectangles filled with colors
|
||||
sampled from simplex and linear ranges respectively.
|
||||
- Draws a vertical divider line in the middle of the application window.
|
||||
|
||||
|
||||
### simplexrange/DemoSimplexUniform01
|
||||
[source code](src/jvmDemo/kotlin/simplexrange/DemoSimplexUniform01.kt)
|
||||
[source code](src/jvmDemo/kotlin/simplexrange/DemoSimplexRange2D02.kt)
|
||||
|
||||
### simplexrange/DemoSimplexUniform01
|
||||
|
||||
This demo creates a dynamic graphical output utilizing simplex and
|
||||
linear interpolation-based color ranges.
|
||||
|
||||
Functionalities:
|
||||
- Defines a list of base colors converted to LAB color space for smooth interpolation.
|
||||
- Constructs a 3D simplex range and a 2D linear range for color sampling.
|
||||
- Randomly populates two sections of the screen with rectangles filled with colors
|
||||
sampled from simplex and linear ranges respectively.
|
||||
- Draws a vertical divider line in the middle of the application window.
|
||||
|
||||
|
||||
### simplexrange/DemoSimplexUniform02
|
||||
[source code](src/jvmDemo/kotlin/simplexrange/DemoSimplexUniform02.kt)
|
||||
[source code](src/jvmDemo/kotlin/simplexrange/DemoSimplexUniform01.kt)
|
||||
|
||||
### simplexrange/DemoSimplexUniform02
|
||||
|
||||
This demo creates a dynamic graphical output utilizing simplex and
|
||||
linear interpolation-based color ranges.
|
||||
|
||||
Functionalities:
|
||||
- Defines a list of base colors converted to LAB color space for smooth interpolation.
|
||||
- Constructs a 3D simplex range and a 2D linear range for color sampling.
|
||||
- Randomly populates two sections of the screen with rectangles filled with colors
|
||||
sampled from simplex and linear ranges respectively.
|
||||
- Draws a vertical divider line in the middle of the application window.
|
||||
|
||||
|
||||
[source code](src/jvmDemo/kotlin/simplexrange/DemoSimplexUniform02.kt)
|
||||
|
||||
Reference in New Issue
Block a user